
An ionic skin that gives robots touch and texture recognition 2023
Humans can touch, grip, and feel objects and atmospheric changes with their fingertips. Fingertips are sensitive and have unique fingerprint patterns.
Roboticists are aiming to improve artificial fingertips so robots can distinguish minute textures and monitor climatic changes. Most skin-like materials fail to mimic human touch.
A novel ionic skin from Donghua University in China could mimic robot fingertips. In an article in Advanced Materials, this skin could allow robots to feel tactile qualities and identify materials.
Robots could feel and recognize textures with an ionic skin.
“This work was initially inspired by the fingertips and fingerprints that we use to touch and perceive the world every day,” Dr. Shengtong Sun told Tech Xplore. “Despite multiple ‘hard’ biomimetic fingertips being reported in recent years, two significant obstacles remain in building artificial soft ionic skins with fingertip-like tactile characteristics.
One is overcoming strain interference in tactile pressure perception, and the other is fine texture recognition like fingertips, which is a sign of great tactile sensitivity.”
In their current study, Dr. Sun and his colleagues sought to overcome these two main hurdles when developing soft ionic skins. They first considered how to produce and define fingerprint patterns on a soft material to match the shape and function of human fingertips.
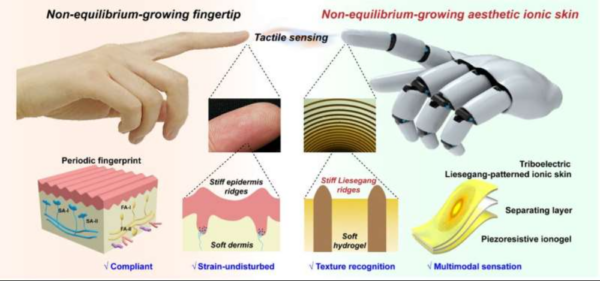
“We noticed that fingertips are featured with a modulus-contrast fingerprint structure with periodic ridges and valleys,” Dr. Sun said. “Such an endogenic periodic pattern is believed to be created by a non-equilibrium reaction-diffusion process from the biochemical Turing effect.”
The hard ridges inside fingertips are thought to operate as mechanical microlevers that quickly transfer tactile vibration impulses to receptors in the dermis, a thick layer of tissue underneath the skin. These ridges maintain practically continual contact with surfaces and objects because they just minimally distort. Fingertip pressure sensitivity is nearly strain distortion-free.
“Inspired by these features of fingertips, we fabricated an aesthetic ionic skin also grown from a non-equilibrium Liesegang patterning process,” Dr. Sun added. “Interestingly, such an aesthetic ionic skin was shown to possess fingertip-like strain-undisturbed pressure sensitivity as well as the ability to recognize textures.”
An ionic skin for robots to feel and recognize textures.
Dr. Sun and his team used Liesegang patterning, which involves precipitation reactions in hydrogel materials, to generate this beautiful ionic skin. This method formed stiff ridges in an elastic hydrogel that resembled human fingertips.
“Liesegang patterning generally occurs when a precipitation reaction is coupled with the mass transport of reagents in porous gel media, leading to periodic bands of precipitates,” Dr. Sun added. A fluoroelastomer layer makes the Liesegang-patterned ionic skin a sensitive triboelectric tactile sensor. The modulus-contrast of soft valleys and rigid ridges allows the triboelectric tactile sensor to detect dynamic pressure stimuli, recognize fine textures, and maintain pressure sensitivity even when stretched to human skin’s maximum failure strain (~50%).
The researchers added additional piezoresistive ionogel to their patterned ionic skin to better replicate the biological multimodal tactile sensory system. The artificial skin-like touch sensor performed well in preliminary tests, even when stretched.
“This work creatively introduces the non-equilibrium reaction-diffusion phenomenon into the design of ionic sensing materials,” Dr. Sun remarked. Aesthetic ionic skin with periodic Liesegang patterns has stiff ridges in a soft hydrogel matrix.
A modulus-contrast hybrid structure gives the ionic skin unique tactile sensing capabilities of triboelectric-based strain-undisturbed pressure sensitivity and fine texture identification, which have seldom been realized in artificial ionic skins.
This team’s hydrogel-based artificial tactile sensor might be utilized to produce soft robotic skins or artificial fingers that can detect dynamic and static pressure signals when a robot grasps objects. Dr. Sun and his team’s findings may also inspire Liesegang patterning-based ionic skins for robotics.
“The Liesegang-patterned aesthetic ionic skin was fabricated on a hydrogel substrate, and the resulting material has a certain thickness of about 2 mm,” Dr. Sun said. Future soft robotic applications may require thinner material. Liesegang patterns will be introduced into an ultra-thin matrix to create thin-film artificial ionic skins in our next experiments.